-
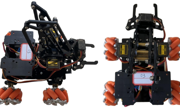
 研发团队: 指导教师: 李忠雄、许婷婷、班昌校、张裕欣(企业导师) 学生团队:22机器人技术唐君准,22计算机应用工程麦翔皓、李汉玫,23信息安全与管理唐美晶。 技术突破: 1.“轮-足”双态混合Rolking运动架构 在3D打印轻量化机架上将35kg·Cm数字舵机与全金属DC减速电机...[产品介绍] 发表时间:2025-10-31
研发团队: 指导教师: 李忠雄、许婷婷、班昌校、张裕欣(企业导师) 学生团队:22机器人技术唐君准,22计算机应用工程麦翔皓、李汉玫,23信息安全与管理唐美晶。 技术突破: 1.“轮-足”双态混合Rolking运动架构 在3D打印轻量化机架上将35kg·Cm数字舵机与全金属DC减速电机...[产品介绍] 发表时间:2025-10-31 -
 研发团队: 指导教师: 蒙振海、叶家发、黄娟、辛瑞莉(企业导师) 学生团队:23信息安全与管理廖庆雨、陈燕萍、曾婷婷,24计算机应用工程刘楚煜,24智能制造工程技术陈显彬。 技术突破: 1.“双推进器+可移配重浮筒”实现无垂推简易六自由度控制 仅靠左右管道推进器差速完成...[产品介绍] 发表时间:2025-10-31
研发团队: 指导教师: 蒙振海、叶家发、黄娟、辛瑞莉(企业导师) 学生团队:23信息安全与管理廖庆雨、陈燕萍、曾婷婷,24计算机应用工程刘楚煜,24智能制造工程技术陈显彬。 技术突破: 1.“双推进器+可移配重浮筒”实现无垂推简易六自由度控制 仅靠左右管道推进器差速完成...[产品介绍] 发表时间:2025-10-31 -
 研发团队: 指导教师:叶家发、莫崇扬、李浩、辛瑞莉(企业导师) 学生团队:22计算机应用工程李贵安、文杰、梁津瑜,23信息安全与管理林妙兰。 技术突破: 1.“ESP32+RS485”六自由度水下实时控制架构 以10美元级ESP32为主控,在10m通信线缆上跑通115kbpsRS485差分信号,...[产品介绍] 发表时间:2025-10-31
研发团队: 指导教师:叶家发、莫崇扬、李浩、辛瑞莉(企业导师) 学生团队:22计算机应用工程李贵安、文杰、梁津瑜,23信息安全与管理林妙兰。 技术突破: 1.“ESP32+RS485”六自由度水下实时控制架构 以10美元级ESP32为主控,在10m通信线缆上跑通115kbpsRS485差分信号,...[产品介绍] 发表时间:2025-10-31 -
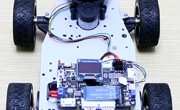
 研发团队: 指导教师:潘家英、周洁文、李寿成、武渝博(企业导师) 学生团队:24计算机应用工程陆开凡、张国浩、黄俊哲、韦思铭、徐飞鸿。 技术突破: 1.“Arduino+麦轮”微型全向底盘 在181110cm、仅手掌大的3D打印车体内实现四麦轮全向移动:N20减速电机(6V/200rpm)配合Ad...[产品介绍] 发表时间:2025-10-31
研发团队: 指导教师:潘家英、周洁文、李寿成、武渝博(企业导师) 学生团队:24计算机应用工程陆开凡、张国浩、黄俊哲、韦思铭、徐飞鸿。 技术突破: 1.“Arduino+麦轮”微型全向底盘 在181110cm、仅手掌大的3D打印车体内实现四麦轮全向移动:N20减速电机(6V/200rpm)配合Ad...[产品介绍] 发表时间:2025-10-31 -
 研发团队: 指导教师:潘家英、黄舒婷、欧文辉、武渝博(企业导师) 学生团队:24机器人技术周祖献、雷森林、邓胜广,24装备智能化技术耿华杨。 技术突破: 1.超大尺寸+麦轮全向ROS导航平台 在园区/厂区级尺寸上仍保持麦克纳姆轮原地旋转与任意方向平移,通过独立弹簧悬挂+...[产品介绍] 发表时间:2025-10-31
研发团队: 指导教师:潘家英、黄舒婷、欧文辉、武渝博(企业导师) 学生团队:24机器人技术周祖献、雷森林、邓胜广,24装备智能化技术耿华杨。 技术突破: 1.超大尺寸+麦轮全向ROS导航平台 在园区/厂区级尺寸上仍保持麦克纳姆轮原地旋转与任意方向平移,通过独立弹簧悬挂+...[产品介绍] 发表时间:2025-10-31 -
 研发团队: 指导教师:肖泽亮、唐硕、韦观泳、李子圣(企业导师) 学生团队:23大数据工程技术张圣港,23计算机应用工程王铭、梁浩俊、林利均。 技术突破: 1.“8推+6舵”全矢量扁平平台 400X325×170mm的PETG框架内集成8台W60推进器(前后左右+垂向)与6路防水舵机,通过自...[产品介绍] 发表时间:2025-10-31
研发团队: 指导教师:肖泽亮、唐硕、韦观泳、李子圣(企业导师) 学生团队:23大数据工程技术张圣港,23计算机应用工程王铭、梁浩俊、林利均。 技术突破: 1.“8推+6舵”全矢量扁平平台 400X325×170mm的PETG框架内集成8台W60推进器(前后左右+垂向)与6路防水舵机,通过自...[产品介绍] 发表时间:2025-10-31 -
 研发团队: 指导教师:苏力、梁彬、罗幸、辛瑞莉(企业导师) 学生团队:22机器人技术唐君准,22计算机应用工程麦翔皓、李汉玫,23信息安全与管理唐美晶。 技术突破: 1.“一芯多模”融合控制架构 单颗STM32F103RCT6通过中断优先级+状态机调度,同时承载8种工作模式(遥控/雷...[产品介绍] 发表时间:2025-10-31
研发团队: 指导教师:苏力、梁彬、罗幸、辛瑞莉(企业导师) 学生团队:22机器人技术唐君准,22计算机应用工程麦翔皓、李汉玫,23信息安全与管理唐美晶。 技术突破: 1.“一芯多模”融合控制架构 单颗STM32F103RCT6通过中断优先级+状态机调度,同时承载8种工作模式(遥控/雷...[产品介绍] 发表时间:2025-10-31 -
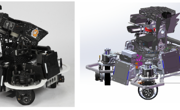 研发团队: 指导教师:韦超英、肖泽亮、莫文东、张裕欣(企业导师) 学生团队:23计算机应用工程李秀雯、黄馨瑶、秦开勇、李斯林、龙一凡。 技术突破: 1.舵轮底盘替代麦克纳姆轮 在低速高扭矩工况下,舵轮提供更强的抓地力与爬坡能力,同时结构更简单、惯量更低,实现零半...[产品介绍] 发表时间:2025-10-31
研发团队: 指导教师:韦超英、肖泽亮、莫文东、张裕欣(企业导师) 学生团队:23计算机应用工程李秀雯、黄馨瑶、秦开勇、李斯林、龙一凡。 技术突破: 1.舵轮底盘替代麦克纳姆轮 在低速高扭矩工况下,舵轮提供更强的抓地力与爬坡能力,同时结构更简单、惯量更低,实现零半...[产品介绍] 发表时间:2025-10-31 -
 研发团队: 指导教师:蒙振海、黄天旭、张磊、辛瑞莉(企业导师) 学生团队:24计算机应用工程陆开凡、张国浩、黄俊哲、韦思铭、徐飞鸿。 技术突破: 1.八推力器全向矢量推进与6自由度精准控制 采用“4水平+4垂直”推力器布局,结合独立BLDC电机驱动与PID-EKF融合算法,实现...[产品介绍] 发表时间:2025-10-31
研发团队: 指导教师:蒙振海、黄天旭、张磊、辛瑞莉(企业导师) 学生团队:24计算机应用工程陆开凡、张国浩、黄俊哲、韦思铭、徐飞鸿。 技术突破: 1.八推力器全向矢量推进与6自由度精准控制 采用“4水平+4垂直”推力器布局,结合独立BLDC电机驱动与PID-EKF融合算法,实现...[产品介绍] 发表时间:2025-10-31 -
 树莓派视觉定位+气动防摔设计,在果蔬园高效搬运肥料到对应区域。 研发团队: 指导教师:吕科锦、廖志洁、杨海钰、辛瑞莉(企业导师) 学生团队:23大数据工程技术张圣港,23计算机应用工程王铭、梁浩俊、林利均。 技术突破: 1.安全搬运 采用气压传动固定与升降。亚德客MA...[产品介绍] 发表时间:2025-10-31
树莓派视觉定位+气动防摔设计,在果蔬园高效搬运肥料到对应区域。 研发团队: 指导教师:吕科锦、廖志洁、杨海钰、辛瑞莉(企业导师) 学生团队:23大数据工程技术张圣港,23计算机应用工程王铭、梁浩俊、林利均。 技术突破: 1.安全搬运 采用气压传动固定与升降。亚德客MA...[产品介绍] 发表时间:2025-10-31
热门搜索:
用户登录